宇树开源UnifoLM-VLA-0大模型,12类复杂操作任务一网打尽
创始人
2026-01-29 21:11:08
0次
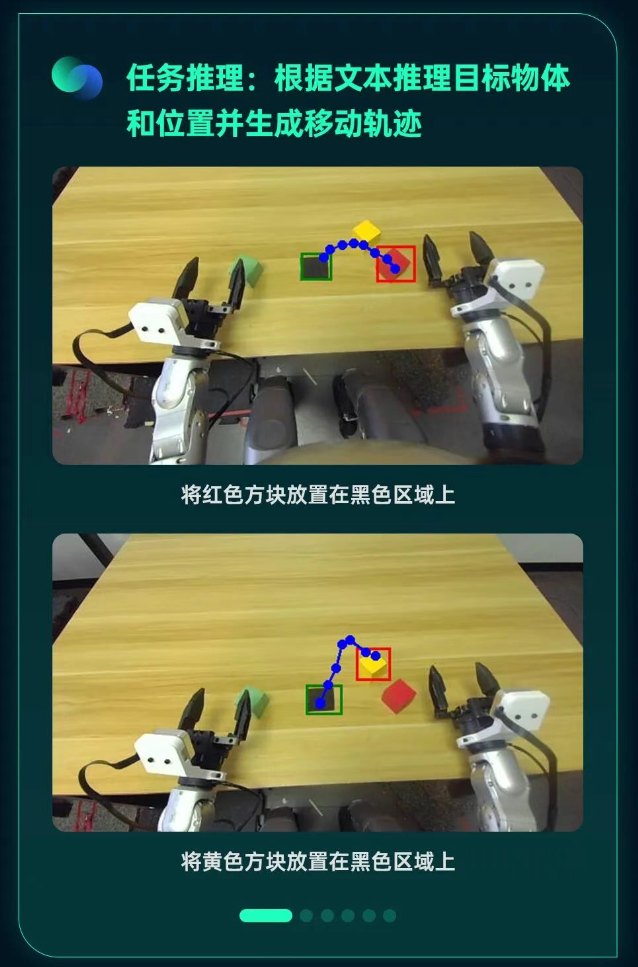
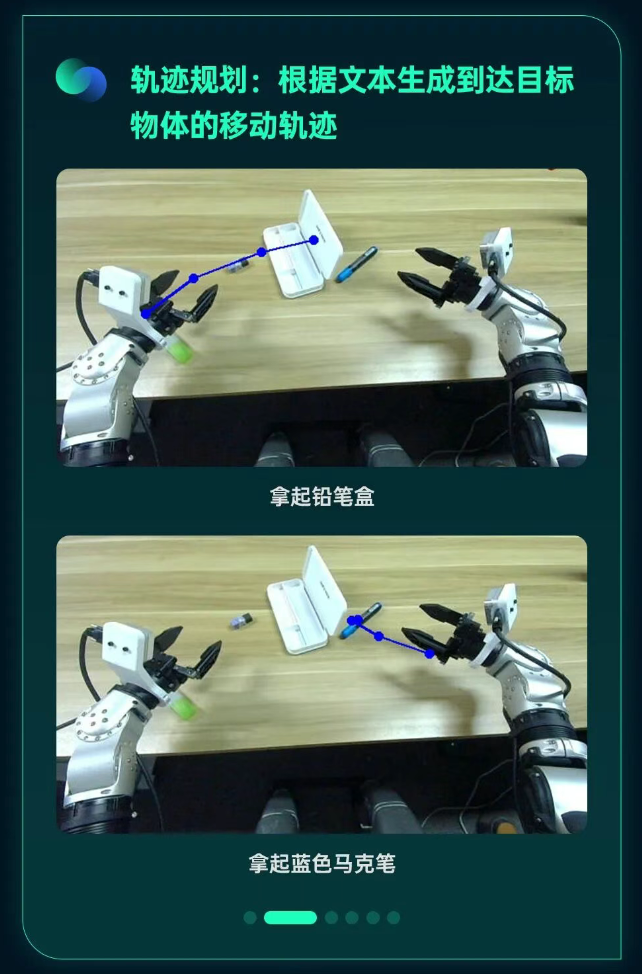
今日,宇树科技宣布开源UnifoLM-VLA-0大模型,这是UnifoLM系列中面向通用人形机器人操作的视觉-语言-动作(VLA)模型。该模型通过在机器人操作数据上的预训练,实现了从图文理解到具备物理常识的“具身大脑”的进化。它通过深度融合文本指令与2D/3D空间细节,增强了空间感知能力,并构建了全链路动力学预测数据,提升了任务泛化性。在真机验证中,该模型仅需单一策略即可高质量完成12类复杂的操作任务。
基于Qwen2.5-VL-7B开源模型,宇树构建了覆盖机器人与通用场景的多任务数据集,并开展持续预训练。数据集包括2D检测与分割、任务层级分解、3D目标检测等多维数据,有效提升了模型对几何空间与语义逻辑的对齐能力。针对操作类任务,宇树对开源数据集进行了系统化清洗,利用约340小时的真机数据进行离散动作的预测训练。模型集成了动作分块预测及动力学约束,实现对动作序列的统一建模,支持长时序动作规划与决策。
在UnifoLM-VLM-0模型的基础上,宇树集成了动作预测头(ActionHead),构建出UnifoLM-VLA-0。经过仿真环境与真机实验的多任务训练验证,该模型展现了单模型处理多任务的通用能力,在LIBERO仿真基准测试中取得了接近最优的性能。在宇树G1人形机器人平台上,基于高质量真机数据集对UnifoLM-VLA-0进行单一策略网络的统一端到端训练,实验结果表明,该模型能够稳定完成全部12项任务,在外部扰动条件下保持良好的执行鲁棒性与抗干扰能力。

相关内容
热门资讯
电竞潮燃“五一”,电竞粤超东莞...
羊城晚报讯 记者陈旭泽报道:5月5日,2026广东省电子竞技超级联赛(以下简称“电竞粤超”)城市巡回...
广东多所高校探索“艺科融通”复...
文/羊城晚报全媒体记者 秦小杰图/受访者提供近日,广东多所专业类高校密集举办系列活动,深入探索艺术与...
两名“红领巾”的跨国相遇!越南...
文/羊城晚报全媒体记者 张小悦图/通讯员 岳青“He is my best friend!(他是我最...
华晨宇直播哭了,发文致歉
4月22日晚,歌手华晨宇发文致歉,在云南举办的火星乐园2.0因不可抗力延期。全文如下:火星乐园2.0...
广州荔湾多宝街道:空间挖潜+数...
文/羊城晚报全媒体记者 梁怿韬 通讯员 成广聚 陈梓佳图/通讯员提供空间狭窄,是地处老城区的广州市荔...
市民反映“广州一高架桥底疑现裂...
4月21日,广州市交通运输部门发布情况核查通报:收到网络反映内环中路电视台处的高架桥疑似裂缝情况后,...
边深蹲边吸氧?广州白云山有了森...
文/羊城晚报全媒体记者 孙牧图/受访单位供图近日,一场别开生面的森林“健身房”暨“爱绿护绿”志愿服务...
以“精度”换“速度”!广州增城...
文/羊城晚报全媒体记者 马灿 通讯员 增宣图/通讯员提供暮春夏至,万物竞发。走进广州增城区,工地上机...
酷!广州这群长者化身无人机飞手...
文/羊城晚报全媒体记者 徐振天图/受访者提供“起飞、悬停、慢慢转向!”4月21日下午,广州市黄村街颐...
每万人发明专利拥有量达228....
4月22日,广州市天河区在广州(国际)科技成果转化天河基地举行2026年知识产权宣传周启动仪式暨主题...