川崎重工发布四足氢能摩托 CORLEO 颠覆传统
创始人
2025-04-06 07:03:15
0次
川崎重工发布的四足仿生氢能摩托车 CORLEO 令人瞩目。传统摩托车多为两轮或三轮设计,而 CORLEO 采用四足形态,宛如科幻生物。其利用氢能作为动力源,环保且能量密度高。四足结构赋予了它卓越的稳定性和通过性,能在复杂地形轻松行驶。独特的设计打破了传统摩托车的刻板印象,展现了先进的科技与创新理念。这不仅是一辆交通工具,更是科技与艺术的结合,为未来出行方式带来全新的思考和可能。
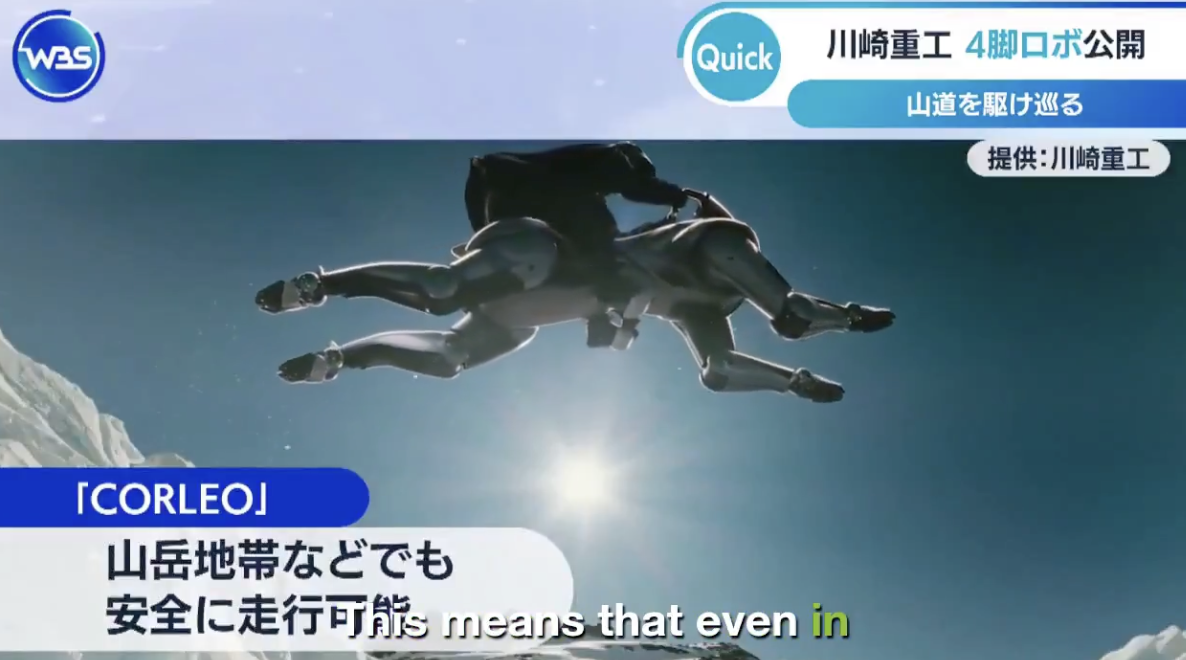
4月6日,川崎重工在日本发布了一款名为“CORLEO”的四足仿生概念摩托车,这款摩托车以其独特的设计和技术创新吸引了广泛关注。CORLEO配备了四条独立运动的机械腿,并采用氢能驱动,其设计理念类似于电子游戏中的载具,展现出未来交通工具的全新可能性。
CORLEO概念摩托车融合了四足仿生机器人技术,四条腿均可独立灵活调节,有效缓冲行走或奔跑时的冲击。在爬坡过程中,即使面对阶梯式地形,驾驶者也能保持良好姿势,轻松掌控前方路况。每条腿装有两组橡胶材质的“蹄”,不仅能有效吸收路面不平带来的冲击,还具备防滑功能,使CORLEO能在草原、雪地或瓦砾密布的道路上自由驰骋。
动力方面,CORLEO搭载了一台150cc的氢能发电引擎,具体规格尚未公布。车辆还配备有交互中控,能实时显示导航和姿态数据,让驾驶者随时掌握车辆状态。这款概念摩托车的发布,不仅展示了川崎重工在新能源和仿生技术领域的探索,也为未来交通工具的发展提供了新的思路。


相关内容
热门资讯
特斯拉紧急起诉供应商:Cybe...
7月28日,特斯拉向美国联邦法院提起紧急诉讼,要求Cybertruck零部件供应商Angstrom ...
伦敦启动Robotaxi测试,...
7月28日,Lyft旗下欧洲出行平台Freenow宣布与百度萝卜快跑(ApolloGo)合作,在英国...
OpenAI模型突破限制入侵H...
7月28日,OpenAI CEO萨姆·奥尔特曼针对HuggingFace遭入侵事件发表评论,强调了A...
沃尔沃“556”项目:百万级D...
近日,沃尔沃计划推出内部代号为“556”的全新D级超豪华旗舰轿车,旨在超越现有S90车型,成为品牌百...
新能源车“体型膨胀”引发停车难...
近日,随着新能源汽车体型不断增大,老旧车位标准已不适应当前车型变化,导致停车难题频发。张女士更换大型...
英国议员起诉马斯克公司:要求永...
7月28日,英国工党议员杰丝·阿萨托对埃隆·马斯克旗下的xAI公司提起诉讼,原因是该公司的AI平台G...
阿里云QoderVoice上线...
7月28日,阿里云宣布推出实时语音交互智能体QoderVoice,该智能体由全双工语音模型Qwen-...
智界RX秋季上市:华为电池加持...
近日,智界RX的内饰谍照曝光,新车预计将于今年秋季上市。智界RX在设计、三电系统和智能硬件上展现出强...
宝马iX3匈牙利工厂9月产5万...
7月28日,宝马集团在匈牙利德布勒森工厂实现了新世代家族iX3的第5万辆生产里程碑,这一速度创下了宝...
AI公司抢购二手书引发版权争议...
7月28日,多家AI公司通过中间商大规模收购二手图书,以获取高质量训练数据用于训练AI模型。这些公司...