理想汽车发布MindVLA-o1:3D视觉编码器革新自动驾驶
创始人
2026-03-18 22:13:05
0次
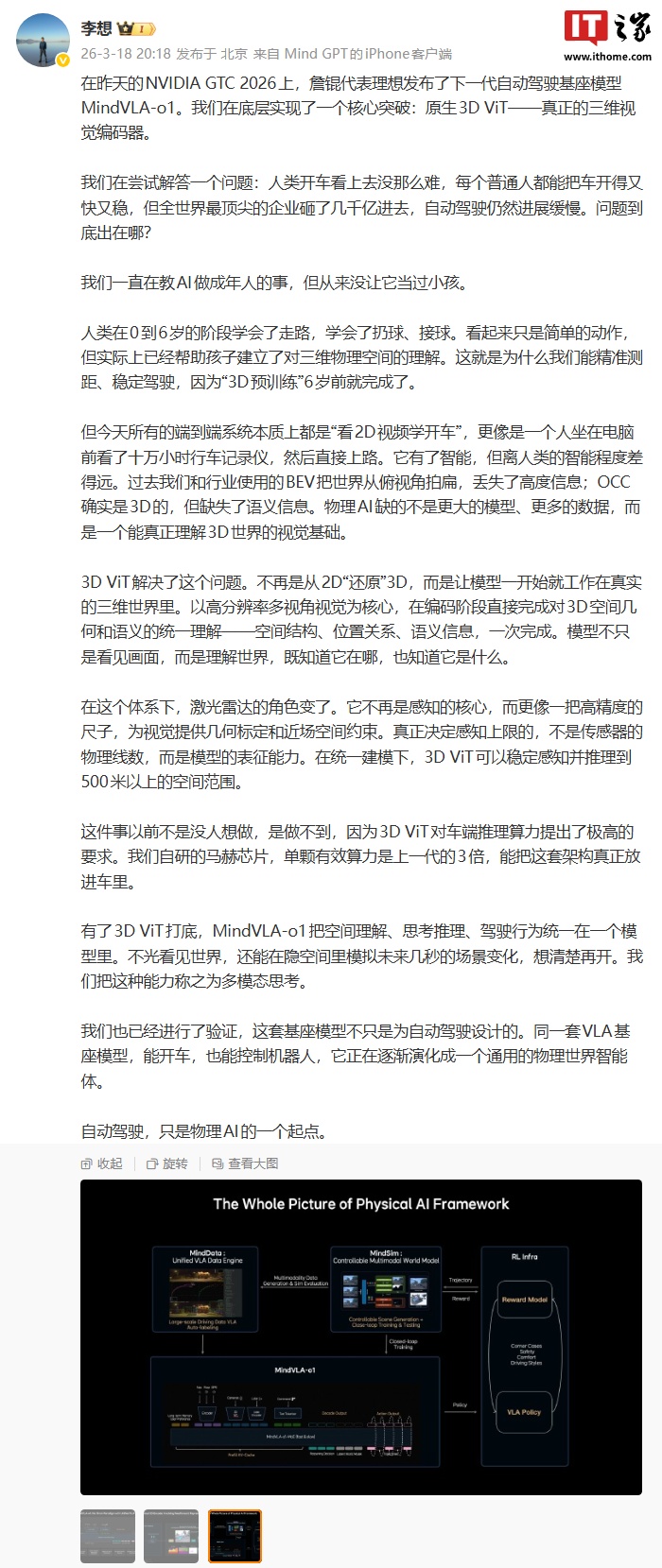
3月18日,理想汽车在NVIDIA GTC2026大会上宣布了下一代自动驾驶基础模型MindVLA-o1。该模型由理想汽车基座模型负责人詹锟发布,标志着公司在自动驾驶技术上的核心突破。MindVLA-o1采用了原生3DViT技术,即真正的三维视觉编码器,旨在解决自动驾驶进展缓慢的问题。理想汽车CEO李想强调,自动驾驶只是物理AI的起点,而3DViT技术能够使模型直接在真实的三维世界中工作,实现对3D空间几何和语义的统一理解。
李想进一步解释说,传统的自动驾驶系统更像是通过2D视频学习开车,而3DViT技术则让AI从一开始就能理解三维世界。这种技术不仅能够识别物体的位置和属性,还能在隐空间中模拟未来几秒的场景变化,实现多模态思考。此外,激光雷达的角色也发生了变化,从感知核心转变为高精度的尺子,为视觉提供几何标定和近场空间约束。理想汽车自研的马赫芯片,单颗有效算力是上一代的3倍,使得这套架构能够真正放入汽车中。MindVLA-o1模型不仅适用于自动驾驶,还能控制机器人,展现出其作为通用物理世界智能体的潜力。

相关内容
热门资讯
奥迪E7X纯电SUV亮相北京车...
2026年4月24日,奥迪与上汽合作的豪华新能源汽车品牌AUDI在2026北京车展上发布了其首款纯电...
吉利银河A7EM/A7EV双车...
今日,吉利汽车发布了2026款银河A7EM/A7EV双车系列,标志着品牌在新能源汽车领域的进一步拓展...
比亚迪2026款夏露营改装版亮...
今日,2026北京车展上,比亚迪王朝网旗下中大型旗舰MPV——2026款夏带来重磅惊喜,官方定制露营...
DeepSeek-V4模型震撼...
4月24日,DeepSeek公司宣布推出其新一代基础模型DeepSeek-V4,该模型已在官网、官方...
比亚迪大唐EV预售开启,950...
4月24日,比亚迪王朝网旗下全新全尺寸旗舰SUV大唐EV正式开启预售,预售价25万元至32万元。新车...
华为问界M6上市15分钟订单破...
4月22日,华为常务董事余承东宣布,搭载鸿蒙智行系统的问界M6汽车上市15分钟内,大定订单已突破10...
千里科技发布AI战略,2027...
4月22日,千里科技在北京举办了AI战略暨产品发布会,宣布了其“AI+车”战略的最新成果,并探讨了A...
越南青年来华“红色研学之旅”广...
文、图/羊城晚报全媒体记者 张小悦 通讯员 岳青4月11日至13日,由共青团中央主办,中央团校、共青...
广州南沙:智能育秧显优势,稻苗...
清风催新绿,春耕正当时。当许多地方仍在沿用传统手工育秧方式时,广州南沙多家育秧中心已率先引入智能化生...
把植物新品种繁殖换个名销售,法...
故事梗概2023 年4月,A公司发现B某、C公司及D公司(法人代表B某)大量对外销售、宣传销售被诉侵...