特斯拉 Robotaxi 首撞:纯视觉系统擦碰停放车
创始人
2025-07-07 22:53:18
0次
特斯拉 Robotaxi 首撞事件引人关注。在纯视觉系统的运作下,该车辆意外与停放车辆发生擦碰。这凸显了纯视觉系统在复杂路况下的局限性。尽管特斯拉一直强调其视觉系统的先进性,但此次事故提醒人们,即使是高度自动化的驾驶系统,在面对停放车辆等特殊情况时仍可能出现意外。这也引发了对自动驾驶技术安全性和可靠性的进一步思考,促使业界不断探索和改进相关技术,以提升自动驾驶的安全性和应对各种复杂场景的能力。
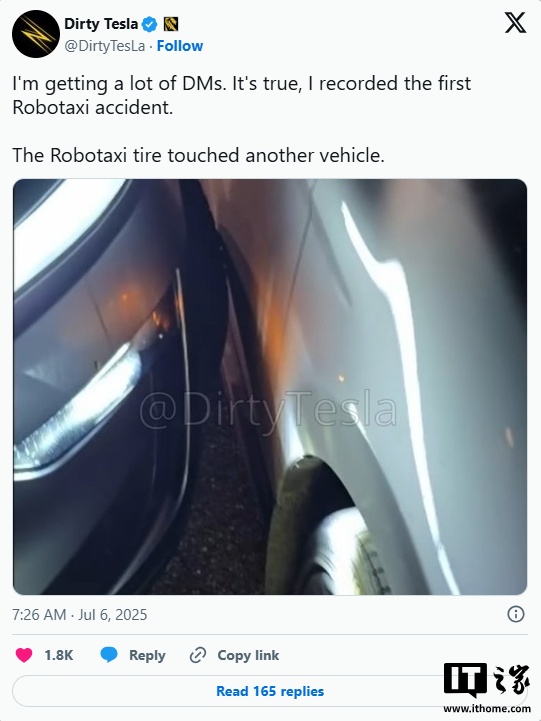
7月4日,特斯拉的纯视觉Robotaxi自动驾驶出租车项目在美国发生了首次碰撞事故。事故发生时,车辆处于静止状态,全FSD系统意外地将Robotaxi驶向了一辆停放的汽车,导致轻微碰撞。此次事故由参与试驾的博主克里斯(网名DirtyTesla)分享,并在社交媒体上发布了视频。视频中显示,特斯拉车辆在没有任何明显原因的情况下,突然转动方向盘,向一辆距离仅几英寸的丰田凯美瑞驶去,最终轮胎轻轻擦过对方车门。
事故发生时,克里斯正在使用Robotaxi前往一家披萨店。车辆在尝试进入停车场时遇到问题,多次尝试失败后放弃,停在了停车场入口旁。特斯拉的轮胎轻轻擦过丰田凯美瑞的车门后,车辆完全停下并亮起了危险警示灯。尽管这是一次轻微的碰撞事故,但它象征着特斯拉Robotaxi项目的首次事故,而该项目的有限试运营仅在两周前开始。此次事故也引发了对特斯拉弃用超声波传感器,转而采用纯视觉系统的讨论,因为基本的碰撞预警系统本应能够检测到停放的物体。


相关内容
热门资讯
中国汽车出口量额双增,新能源车...
5月9日,中国汽车出口市场在高油价和运力紧张的背景下实现了显著增长。根据海关数据,2026年4月,中...
特斯拉Model 3/Y新增“...
5月9日,特斯拉美国官网更新显示,Model 3和Model Y Performance高性能版汽车...
8家新能源车企“锁电”约谈?蔚...
近日,有关8家新能源车企因远程“锁电”问题被集中约谈的消息在社交平台广泛传播。对此,蔚来汽车明确表示...
理想L9Livis全尺寸旗舰S...
5月9日,理想汽车CEO李想对外解释了理想L9换代周期长达四年的原因。他指出,汽车与消费电子产品不同...
“ChatGPT中文口头禅“我...
5月7日,《连线》杂志发表文章,探讨了ChatGPT在中文语境下出现的高频口头禅现象。文章指出,其中...
理想L9四年磨一剑,李想揭秘换...
5月9日,理想汽车宣布全新一代理想L9将于本月15日上市。理想L9自最初上市以来已过去4年,换代周期...
小鹏汽车辟谣“锁电约谈”:未受...
5月9日,小鹏汽车法务部发表声明,针对网传“因锁电被约谈立案”的消息进行辟谣。声明中指出,部分社交账...
比亚迪海鸥2026款即将发布:...
5月9日,比亚迪宣布2026款海鸥“智感进阶”车型将于5月11日正式发布,这将是首款支持搭载激光雷达...
蚂蚁集团发布万亿级AI模型Ri...
5月9日,蚂蚁集团旗下百灵大模型发布了万亿级旗舰思考模型Ring-2.6-1T,专为应对真实复杂任务...
百度文心5.1模型全球排名第四...
5月9日,百度宣布推出新一代基础大模型——文心大模型5.1,并已在百度千帆模型广场、文心一言官网上线...